Competition and risk issues in the design of electrical control loops
Through a detailed case study of competition and risk issues in electrical control loops, this article highlights the hidden dangers and potential consequences that can arise. It emphasizes the importance of awareness among electrical engineers, urging them to learn from past experiences, refine their design principles, and enhance the reliability and efficiency of electrical control systems. By addressing these issues proactively, professionals can prevent unexpected failures and ensure safer, more stable operations.
Competition and risk in electrical control circuits pose serious threats to both human safety and equipment integrity, potentially leading to catastrophic accidents. Therefore, they must be given significant attention during the design and implementation stages. In circuit design, the issue of competition and risk is crucial because it directly affects the system’s reliability. Additionally, due to the intuitive nature of strong electricity control, such problems are often overlooked. However, poor design or incorrect wiring during installation or maintenance can lead to these issues, making them a critical concern for engineers.
After the soft starter initiates motor bypass operation, the control principle diagram for free stop and delayed stop is shown in Figure 1. The motor starts when the intermediate relay KA1 is activated. Once the motor reaches its operating speed, the intermediate relay KA2 closes, energizing the bypass contactor KM and allowing the motor to run in bypass mode. When SB1 is pressed, the coils of KA2 and KM are de-energized, resulting in a free stop. Pressing SB2 energizes the time relay KT, which closes its normally open contact instantly and maintains it until the time-delayed normally closed contact opens, at which point KA2 and KM are de-energized, stopping the motor.
While the control logic appears sound, a closer inspection reveals potential issues in the delay stop circuit. If KA2 and KT use different types of relays—such as one being electromagnetic and the other electronic—their coil activation times may differ significantly. This can cause a "race condition" where the timing of actions becomes unpredictable. For instance, when SB2 is pressed, KT energizes and self-latches, but if the time-delayed normally closed contact of KT opens before KA2 fully de-energizes, the motor might not stop properly. In some cases, the motor could fail to delay stop, leading to inconsistent behavior and reduced system reliability.
For example, if KT is an electronic time relay (like ST3PC-D) and KA2 is an electromagnetic intermediate relay (like JZC3-22d), the electronic relay may act faster than the electromagnetic one, causing KA2 to remain energized longer due to coil remanence. This can result in the motor failing to stop as intended. To resolve this, using relays of the same type—such as replacing KT with a mechanical time relay like JSK4-224d—can eliminate the race condition and improve system stability.
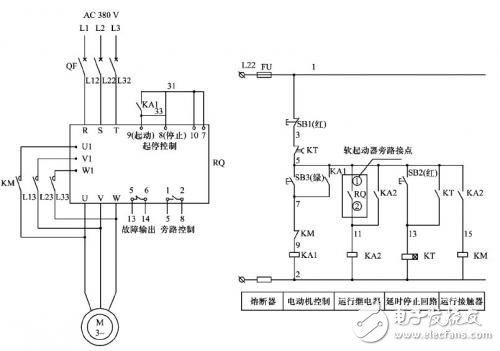
Figure 1 shows the principle of motor free stop and delayed stop control.
BLPS laser safety protective device is designed for personal safety used on hydraulic bender.
The dynamic test technology it used has passed the Type 4 functional safety assessment by TUV, and get the national invention patent. The product reaches the advanced technological level of similar products.
BLPS laser safety device provides protection zone near the die tip of the bender to protect fingers and arms of the operator in close to the upper mold die tip. It is the most effective solution so far to preserves the safety and productivity of the bender.
Press Brake Protection,Laser Guarding Device,Press Brake Guarding Systems,Press Brake Guarding
Jining Keli Photoelectronic Industrial Co.,Ltd , https://www.sdkelien.com