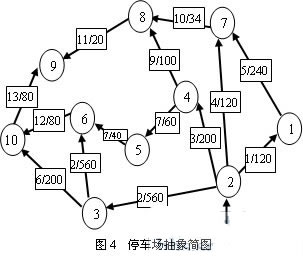
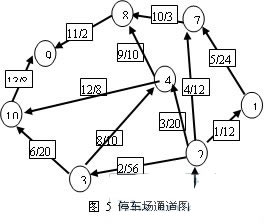
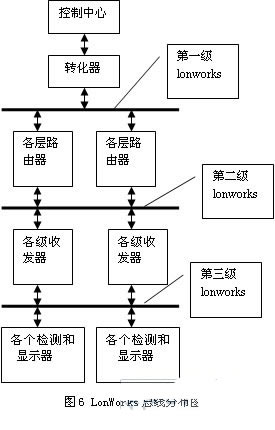
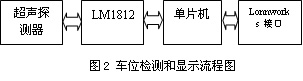
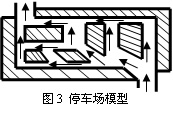
1 Introduction This article refers to the address: http:// With the increase in parking demand, the size of parking lots has become more and more large. A lot of researches have been done on smart parking lots in China. However, most of the parking lot management systems in China still have the disadvantages of intelligence and low integration, neglecting the automation of the parking process, especially the guidance of parking spaces. How to detect the parking space and guide the driver's convenient parking is also an important part of parking management. The program guides the shortest path effective algorithm and the on-site parking space. And the fieldbus communication and other aspects are elaborated, which has certain reference value for the design of extra large intelligent automatic parking lot. 2. Principle and composition of ultrasonic detection and guidance system 2.1 Ultrasound detection The ultrasonic probe completes the transmission and reception of the ultrasonic signal, and the single chip system and related circuits complete the analysis and statistics of the information. An ultrasonic detector is installed above the parking lot, and ultrasonic waves are emitted from the top to the bottom. The reflected waves coming back from the ground or the vehicle are different, and analyzed by the microprocessor to make a judgment of having a car or no car [1]. The working principle is that the parking space ultrasonic detector installed above the parking space detects the parking berth vehicle, and sends the signal that the parking space has been occupied to the data collector. When the collector receives the data, the parking time is recorded and stored in the data storage. The data collector processes the received parking space data in real time, and then transmits the relevant processing results to the management computer, which can store the information in the system database for query statistics [4]. The schematic diagram is shown in Figure 1: 2.2 Parking guidance system After obtaining the path of each parking space by the shortest path algorithm, each path is sorted by length, and the path information corresponding to each parking space and the corresponding information corresponding to the intersection of each path are sequentially listed in the database. For storage, when you need to arrive at a parking space, you only need to retrieve the information related to this parking space from the database, and associate this information with the ID card to display it on the electronic display [5]. The detection signal is sent to the single-chip microcomputer through the ultrasonic detector, and the indication signal is sent to the parking space by the control switchboard, so that the electronic display screen displays the corresponding parking space. There is an indicator light above each parking space. By detecting the parking space, the parking space is accurately judged. If the indication is correct and the parking is reasonable, the indicator light will be automatically extinguished when the detection signal is sent, otherwise it will remain on. And through the detection system to send an error signal to the control switchboard, thereby achieving the unification of detection and guidance. Its parking space detection and display flow chart 2 shows: 3. Genetic algorithm search for optimal path For the study of oversized parking lots, it is more complicated to establish a simple model [2], as shown in Figure 3: According to the composition method of the graph theory, the parking lot structure diagram in Fig. 3 is abstracted into an entitlement directed graph of E = (V, A, D). Where V = { V1, V2,..., Vn } is a finite point set (one node represents an intersection or an effective parking space); A = {(Vi, Vj ) ∈N × N} is a finite arc set, |V| =n,|A|=m; D={dij} is the edge weight set, dij is the length of the arc (Vi, Vj). If there is no direct path between Vi and Vj, then dij is ∞ (generally given in the program) Dij assigns a large enough number to do the processing). The connection of the path is denoted by Lij. The definition is as follows: Lij =1 point i to point j there is a direct path Lij= -1 point j to point i has a direct path (3.1) Lij= 0 point i and point j do not have a direct path For a certain period of time, dij is a positive integer that does not change over time. The parking lot is actually a static discrete network model. Due to the unidirectional nature of the internal passages in the parking lot, mathematically, the shortest path problem can be described as: The channel is the edge of the figure, the intersection of the channel and the parking space are the map points, and the distance between the two places in the parking lot is the right. As is apparent from Fig. 4, if the distance traveled by the parking space shown in Fig. 3 in the parking lot is the shortest, the shortest path of points 1 to 10 and points 10 to 9 is found. The parking spaces on both sides of the same channel can be studied as the same object, that is, the channel where the parking space is studied and the intersection at both ends of the channel are abstracted into one point, that is, point 4 and point 5 in FIG. The edges 7' and 7' are abstracted into a point 4, from which we can further obtain Figure 5. In order to obtain the actual shortest path of the parking space shown in Fig. 3, firstly, with reference to Fig. 5, the shortest path from point 1 to point 4 and point 4 to point 9 is first obtained. To get the actual shortest path of all parking spaces on the channel in Figure 3, simply add the length of the channel itself to the channel abstract shortest path. This takes the shortest optimal path. The steps of the genetic algorithm: (1) define an objective function; (2) Initialize the feasible solution group under certain constraints, each feasible solution is coded by a vector X, called a chromosome, and the component of the vector represents a gene, which corresponds to a certain decision variable of the feasible solution; (3) Calculate the objective function value corresponding to each chromosome Xi (i = 1, 2, ..., n) in the population, and calculate the fitness value Fi by this, and evaluate the feasible solution according to the size of Fi; (4) With the mechanism of survival of the fittest, the chromosomes with poor fitness values ​​are eliminated, and the surviving chromosomes are randomly selected according to their fitness values ​​according to their fitness values ​​to breed and form new groups; (5) generating offspring through the operation of hybridization and mutation; (6) Repeat steps (3) to (5) for the offspring population to perform a new round of genetic evolution until the iteration converges, ie the optimal solution or quasi-optimal solution is found. Experiments show that the genetic algorithm-based path search algorithm used in this scheme is feasible for solving the shortest path problem of parking lot. 4, on-site communication LonWorks is the communication bus of the whole system. LonWorks adopts the design method of network variables. All information exchange including interface Il0 is carried out through network variables, which brings great convenience to the design of the network. In addition to all the features required by field-level control systems, LonWorks technology has the advantages that other fieldbuses do not have: free network topology, flexible and low-cost cabling, and the introduction of LonWorks technology into the management of parking lots. LonWorks technology is fully utilized to reduce the cost, decentralized control and interoperability, which improves the performance of the system. Each main equipment in the field has a LON module for control [6]. And each LON module adopts the CPU standard plug-in board, easy and maintenance. The communication system designed by LonWork is roughly divided into three levels: the first level of LonWorks is the communication between different layers of routers; the second level of LonWorks is between the transceivers of the same layer and between the routers of the upper level. Communication; Level 3 LonWorks is the communication between different parking spaces and transceivers in the same layer. As shown in Figure 6. 5, the conclusion The program comprehensively utilizes the knowledge of ultrasonic detection, parking space guidance, genetic algorithm, fieldbus communication, etc., and studies a set of intelligent parking subsystem intelligent management subsystem with high degree of automation, and integrates the currently developed parking lot subsystem. The realization of the system is mainly to detect the parking condition of the parking lot in real time through the parking space ultrasonic detection system, obtain the parking space information, and the data processing center processes the detected information to find out the parking spaces and the corresponding parking spaces that are most convenient for the user. The path information, its display and the voice device guide the user to the parking space according to the processed information. With the deepening of research and the application of various new technologies, the overall operational efficiency of the parking lot will be greatly improved, and it will have certain reference value for the design of the extra large parking lot in the future. references [1] Lu Wenke, Zhu Changchun, Liu Junhua. Research on ultrasonic digital range finder[J]. Chinese Journal of Scientific Instrument, 2003, (02), 218-219. [2] Deng Yingwei, Zhang Fan. Research on Optimization of Parking Spaces in Parking Lots[J]. Computing Technology and Automation, 2006, 25(01), 53-54. [3] Xu Qiong, Chen Rongqing, Guan Yunlan. Discussion on the shortest path problem based on genetic algorithm[J]. Journal of East China Geological Institute, 2003, 26(02), 168-172. [4] Gao Xudong, Cao Yu. Design of ultrasonic parking detector system [J]. Heilongjiang Science and Technology Information, 2008, (03), 31-32. [5] Ren Changfeng. Solutions for parking lot access management and parking space guidance [J].2005 Intelligent Building and Urban Information, 2006, (01), 31-35. [6] Wu Lixiong. Lonworks Fieldbus Control Module [J]. Industrial Control Computer, 1998, (5), 41-45. Traditional Reflector,Aluminium Street Reflector,Street Lamp Reflector,Safety Lamp Reflector Yangzhou Huadong Can Illuminations Mould Manufactory Co., Ltd. , https://www.light-reflectors.com
 (3.2)
(3.2)