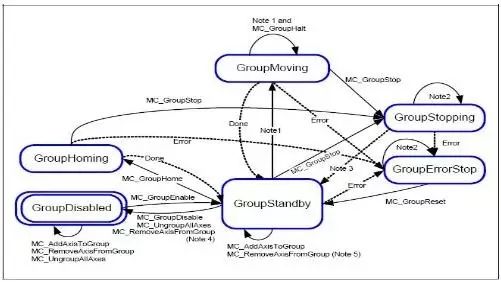
I. Overview Traditionally, industrial robots have relied on complex, proprietary programming languages that are challenging for outsiders to understand and are typically only accessible to specialized robot programmers. In contrast, motion controllers today are often programmed using PC-based libraries or other proprietary languages, while PLCs (Programmable Logic Controllers) are commonly programmed with ladder logic. As automation systems become more advanced, the integration of PLCs, motion controllers, and robots has become essential. Each component brings its own strengths, but the need for a unified programming approach has grown. Many end users now prefer to program robots, motion controllers, and PLCs using a familiar PLC language, as it simplifies development and maintenance. To address this, the PLCopen working group has developed standardized tools that allow motion control to be programmed directly within the PLC environment, reducing complexity and improving consistency across different platforms. II. PLCs Since their introduction at General Motors in 1968 to replace hard-wired relays, PLCs have primarily used ladder logic for programming. They excel at controlling digital and analog devices, but handling more complex, continuous processes can be difficult compared to high-level languages like BASIC, C, or C#. Although some modern PLCs support higher-level programming, most still rely on ladder logic. Low-end PLCs may offer basic motion control through step and direction outputs, while higher-end models require additional modules for more advanced functionality. Despite these limitations, most PLCs are still programmed using ladder logic, requiring engineers to be familiar with both the programming environment and the specific function blocks needed for each application. III. Motion Controllers Motion controllers in the market typically include features such as interpolation, coordinated motion, gear and cam functions, and event-triggered actions. Older controllers used dedicated inputs and outputs per axis, including enable signals, overtravel limits, and encoder inputs. Newer controllers rely on digital networks like EtherCAT or SERCOS to communicate with drives, allowing direct digital I/O connections. However, when it comes to coordinated motion—such as moving an end effector to a precise point—motion controllers lack the sophistication of robot controllers. They require manual calculation of each axis position, whereas robots use inverse kinematics to simplify this process. These systems remain widely used but require deep knowledge of their specific programming environments. IV. Robot Controllers Robot controllers are designed for complex, coordinated motion, making them far superior to traditional motion controllers in tasks involving mechanical linkages. While motion controllers must calculate each axis’s position individually, robot controllers use inverse kinematics to determine the required joint movements based on a target point in space. This makes robotic programming more intuitive but also more specialized. Like other control systems, robot controllers require familiarity with their unique programming environments, which can create challenges for developers who need to work across multiple platforms. V. Integration into a Single Machine Controller To address the growing need for seamless integration, the PLCopen working group has developed standardized tools that allow motion control to be programmed directly within the PLC environment. This initiative aims to unify PLC, robotics, and motion control under a common language, making it easier for machine builders and service personnel to manage. Functional blocks like relative and absolute movement are now standardized, enabling smoother coordination between different axes. The standard also supports hybrid operations, where multiple motions can be combined and executed sequentially without interruption. For example, one axis can transition to a new motion at non-zero speed, creating a smooth path across the entire system. One key challenge is determining which axes should move together during coordinated operations. To solve this, PLCopen introduced the concept of motion groups. When an error occurs in a group, the controller can respond appropriately, ensuring that only the affected axes are impacted. This grouping allows programmers to focus on the overall machine task rather than individual axis behavior. By implementing a group state machine, the controller manages the motion group autonomously, improving reliability and simplifying system design. The fourth part of the PLCopen motion standard introduces functional blocks for coordinated motion, including motion conversion functions. These standardized blocks allow for complex 3D motion control, eliminating the need for manufacturer-specific solutions. This standard bridges the gap between PLCs, CNC systems, and robot controllers, enabling full machine control within a single programming environment. It integrates motion and logic control, offering real-time data exchange without delays that could otherwise limit performance. Today, it's even possible to synchronize robots with additional servo axes using a single machine controller—a capability once exclusive to robot-specific systems. Conclusion The ultimate goal of the PLCopen standard is to make control programs hardware-agnostic and independent of any specific manufacturer. By supporting the same underlying code across different hardware platforms, it reduces the burden on programmers who previously had to learn proprietary languages. This leads to more accurate and efficient control systems, shorter development cycles, and faster time-to-market. Additionally, PLCopen simplifies the development process by reducing engineering complexity and training requirements, making it more accessible to PLC programmers. Ultimately, it brings together motion control and logic control in a single, unified system, paving the way for smarter, more flexible automation solutions. Modified Sine Power Inverter,Sine Wave Vs Square Wave Inverter,Modified Sine Wave Power Inverter,Modified Sine Wave Inverter zhejiang ttn electric co.,ltd , https://www.ttnpower.com